News

7 August 2025
Ahmedabad University Opens 24×7 Student-Managed Tinkerers' Lab Equipped with Cutting-Edge Tools

25 July 2025
Devanshee Kansara, BTech, Class of 2026, Wins InventX 2025 at IIT Jammu for Cutting-Edge Biomedical Device

15 July 2025
Leading Sustainable Med-Tech: Professor Agarwala Awarded WISER Fellowship 2025

30 June 2025
BTech Students' AI Innovation Wins Top Spot at International Eye Segmentation Challenge
23 June 2025
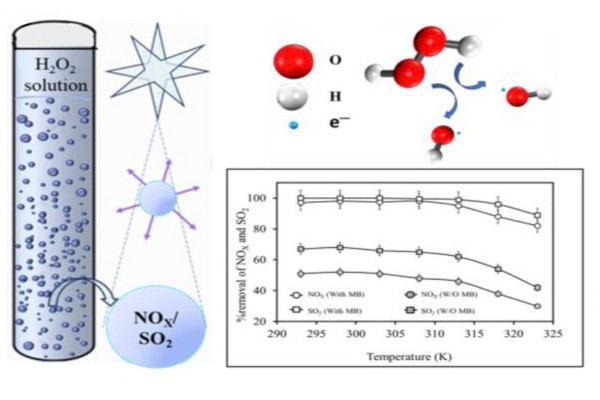
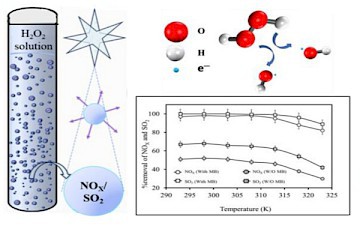
Novel Microbubble Method Achieves 100 per cent SO₂ and Over 95 per cent NOx Removal

23 May 2025
Strengthening Industry-Academia Collaboration to Train Engineers of Future


18 April 2025
Ahmedabad University Partners with Tata Indian Institute of Skills to Elevate Skill Development and Innovation


10 March 2025
BTech Students Further Ahmedabad University's Pursuit for Research Excellence at NCC- 2025 Conference

11 February 2025
Ahmedabad University Gets High-Performance Computing System to Strengthen its Research Ecosystem

20 January 2025
Student-Professor Duo Makes History at COMSNETS 2025 with Best Paper Award Win

7 August 2025
Ahmedabad University Opens 24×7 Student-Managed Tinkerers' Lab Equipped with Cutting-Edge Tools

25 July 2025
Devanshee Kansara, BTech, Class of 2026, Wins InventX 2025 at IIT Jammu for Cutting-Edge Biomedical Device

15 July 2025
Leading Sustainable Med-Tech: Professor Agarwala Awarded WISER Fellowship 2025
30 June 2025
BTech Students' AI Innovation Wins Top Spot at International Eye Segmentation Challenge
23 June 2025
Novel Microbubble Method Achieves 100 per cent SO₂ and Over 95 per cent NOx Removal

23 May 2025
Strengthening Industry-Academia Collaboration to Train Engineers of Future


18 April 2025
Ahmedabad University Partners with Tata Indian Institute of Skills to Elevate Skill Development and Innovation


10 March 2025
BTech Students Further Ahmedabad University's Pursuit for Research Excellence at NCC- 2025 Conference

11 February 2025
Ahmedabad University Gets High-Performance Computing System to Strengthen its Research Ecosystem

20 January 2025
Student-Professor Duo Makes History at COMSNETS 2025 with Best Paper Award Win
3 January 2025
New Model Developed To Enhance Atmospheric Correction for Environmental Monitoring
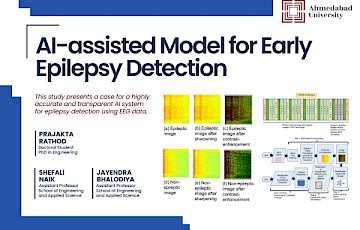
2 January 2025
Ahmedabad University Doctoral Student Develop AI-assisted Model for Early Epilepsy Detection
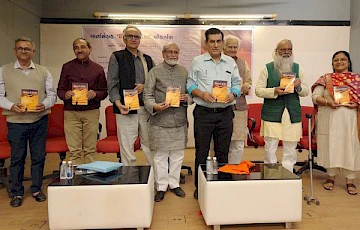
22 December 2024
Ahmedabad Professor Publishes Anthology Exploring Lives in North Gujarat and Beyond
21 December 2024
Autonomous Vehicle Technology Success Hinges on Interdisciplinary Partnerships

12 December 2024
Best Oral Presentation Award for Ahmedabad University Student's CO2 Conversion Research

12 December 2024
Students Explore Latest Auto Innovations during their Visit to International Automobile Centre of Excellence

27 November 2024
Creating Future-ready Workforce: Combining Strengths of Education, Research, and Industry-academia Collaboration

25 November 2024
Zeel Delvadia, BTech Class of 2024, Joins University of Windsor to Study Mechanical Engineering

25 November 2024
Shubham Prajapati, BTech Class of 2024, Joins Drexel University College of Engineering to Study Robotics and Autonomy

21 October 2024
Devam Bhatt, BTech Class of 2024, Joins McMaster University to Pursue a Master’s in Manufacturing Engineering

4 October 2024
Ahmedabad University Inaugurates India’s First MTech in Composites, Creating Pathways for Next Generation of Material Scientists

26 September 2024
Aditya Dave, BTech Class of 2024, Joins North Carolina State University to Pursue Mechanical and Aerospace Engineering

12 September 2024
Ahmedabad University Partners with KUKA India Pvt Ltd. To Build Capacity in Robotics


8 August 2024
Technical Knowledge, Project Management, and Skill Form the Holy Trinity of Success, says Ahmedabad Alumnus
1 July 2024
Ahmedabad University Professor Receives IFI-funded Fellowship for Visit and Research Collaboration in France on Green Hydrogen Generation
18 June 2024
Research Shows How Advanced Technological Intervention Improves Survival Predictions for Glioma Patients

7 June 2024
Ahmedabad University Professors' Edited Book on Digital Agriculture Gets German Translation

24 May 2024
Ahmedabad University Engineering Students Selected for Google Summer of Code Programme

20 May 2024
Ahmedabad University to Collaborate with Composites Excellence Center of Asia for Promoting Quality Manpower in Composites

3 January 2024
Doctoral Student Vrunda Gadesha Presents New Approach to Automatically Annotate Text Data Sets

2 January 2024
Tech Students' Rover Robot Project awarded 2nd prize at GUJCOST's ROBOFEST 3.0
11 December 2023
Ahmedabad Doctoral Student Mahula Santra presents on Modelling and Simulation of Green Solvents and its Application in CO2 Utilisation at European Molecular Liquids Group (EMLG) and the Japanese Molecular Liquids Group (JMLG) 2023

11 December 2023
Ahmedabad Engineering Students at 8th biennial ASME Gas Turbine India Conference

2 November 2023
Ahmedabad University Student Chapter Wins the Outstanding Student Chapter Award 2022-2023 for the Fifth Consecutive Year

2 November 2023
Two Students from the School of Engineering and Applied Science Get Recognised for their Contribution to the AIChE Ahmedabad University Student Chapter

2 November 2023
Anannya Oli (BTech ‘24) Wins Second Prize in Student Technical Presentation Competition Conducted by AIChE

17 October 2023
Ahmedabad University and ATIRA Partner to establish a 21st Century Initiative on Composites

5 October 2023
Akhand Rai Recognised in the World's Top 2% Scientists 2023 List by Stanford University

21 August 2023
Pragnesh Patel Presents Study on Crop Yield Prediction Based on Deep Learning


17 July 2023
Sanjay Chaudhary and Mehul Raval’s Book Analyses Digital Transformations in Agrarian Sector


26 June 2023
Akhand Rai Receives Science and Engineering Research Board (SERB) Funding for Research on Intelligent Pipeline Leak Detection

18 May 2023
Dharamashi Rabari Receives Gujarat Council on Science and Technology Funding for Research on Carbon Dioxide Cycloaddition

7 May 2023
Ahmedabad Engineering Students at Bosch Future Mobility Challenge 2023, Romania, for Second Successive Year


28 April 2023
Aneri Dalwadi Joins University of Texas at Austin for Masters in Information Systems


27 April 2023
Devanshee Kansara Selected to Highly Competitive Women Engineers Programme

27 April 2023
Swapnil Shastri and Arunima Singh Win Best Paper Award for Study on Removal of Water Effluent Using Ozonation Facilitated by Iron Catalyst



24 March 2023
Ahmedabad Engineering Students Visit Deepak Nitrite Limited’s Manufacturing Facility for Overview of Chemical Process Industry

8 February 2023
New Study Proposes Acoustic Emission Technique for Leak Detection and Localisation in Industrial Pipelines

7 February 2023
Abhi Patel Presents Study on Efficiently Detecting and Measuring Mental Stress Using Recurrent Deep Learning

19 January 2023
Vrunda Gadesha Present Study for Classification of Employees with 'Big Eleven' Industry 4.0 Competencies

30 December 2022
Siddharth Agrawal Wins Best Conference Paper Award for his Study on Identification of Truck Licence Plates for Weighbridge Automation

21 November 2022
AIChE Ahmedabad University Student Chapter Wins Outstanding Student Chapter for 2021–2022

11 November 2022
Srishti Sharma Receives SHODH Scholarship for Research on Creating a Framework for Modelling and Prediction of Athletic Game Performance and Injury Risk

10 November 2022
Manav Vakil Wins Award for Study on Enhancing Epoxy Resin with Core Shell Rubber

9 November 2022
SHODH Scholar Vrunda Gadesha Develops Mahabharata Vocabulary Using Natural Language Processing

8 November 2022
Rajeshree Liya Receives SHODH Scholarship for Research on Heterogeneous Catalysis

10 October 2022
Akhand Rai Recognised in the World's Top 2% Scientists List Stanford University



8 August 2022
Nitin Banker Wins Grant for Research on Fossil Fuels Alternative in Refrigeration



17 July 2022
Jimil Desai Selected to Work at the European Council for Nuclear Research (CERN)

17 July 2022
Vidit Vaywala to Study Information Systems at the University of Maryland








11 May 2022
Ahmedabad Student Receives Dean's Excellence Scholarship for The University of Texas at Dallas





25 January 2022
Professor Dhaval Patel Leads Breakthrough Research on Vehicular Network

8 January 2022
Ahmedabad University Trio Combine Mental Health With Mechanical Engineering to Conceptualise Award-winning Design for a Toy for Autistic Children

17 December 2021
Ahmedabad Doctoral Student secures the ‘Young Researcher Award for Best Presentation’ at the IC2S2TD-2021

14 December 2021
Ahmedabad PhD Scholar Wins 3rd Prize at IEEE for the Paper 'Deep Learning-based Emulator for 6S Atmospheric Correction Model'

9 November 2021
Professor Akhand Rai Featured in World’s Top 2% Global Scientist Lists by Stanford University


9 November 2021
BTech Student Wins at Intel’s AI Global Impact Festival 2021 for Surveillance Project That Blends Human Intelligence and AI

8 November 2021
Ahmedabad Professors co-edit the book titled ‘Data Science Applications in Agriculture and Natural Resource Management.’


1 November 2021
BTech Students Beat BITS Pilani, IIT Madras and Others to Win AIChE Awards

20 October 2021
Ahmedabad PhD Graduate Brijesh Soni joins Boston College, Massachusetts, United States


7 September 2021
Musical Traditions of India – An Introduction for Engineering and Business Students

6 September 2021
BTech Alumni Released a Study to Reduce Fuel Consumption, Fuel Cost and Travel Time in the City of Ahmedabad


31 July 2021
Professor Jaina Mehta and Vidit Ghelani's startup 'Parkin' is selected by GUSEC for funding


14 June 2021
Ahmedabad University Student Clinches Gold Medal with Article on Autonomous Driving



23 April 2021
Research Paper of Professor Dhaval Patel is published by renowned IEEE Transactions on Wireless Communications


11 March 2021
Smit Mandavia (Student of BTech in ICT) is recruited by Google for the position of Software Engineering.

24 February 2021
Snigdha Khuntia Receives Funding from the Department of Science and Technology for Research on Removal of Trace Pollutants

15 December 2020
Ahmedabad University Collaborates With the Indian Society of Agricultural Information Technology for Workshop on Data Science

16 August 2019
Harshal Oza Receives Funding from Department of Science and Technology for Remote Controlling of Industrial Robot

9 February 2019
Industrial Visit to RBD Engineers to Understand Products, Processes, and Challenges in Operations

27 December 2018
Study by Dhaval Patel to Impact Analysis, Design, and Simulation of Cognitive Radio Systems



18 June 2018
Faculty Development Programme on Advanced 5G Wireless Communication Organised by the School of Engineering and Applied Science

13 June 2018
Ahmedabad Professors Receive Funding From the Department of Science and Technology for Developing Data Analytics Architecture


30 April 2018
Snigdha Khuntia Receives Research Funding Under the DST-SERB Early Career Research Award for Work on a Low-Temperature Ozone-Based Process

14 March 2018
3rd Annual Technology Fest, Ingenium 2018, to be Organised by the School of Engineering and Applied Science

11 February 2018
Rahul Patel to Pursue Research in Applied Mathematics at the University of Montreal

20 January 2018
Ahmedabad Professors Receive Department of Science and Technology Grant to Develop Data Content Standards


20 December 2017
Mitaxi Mehta Receives DST Funding for Understanding Hamiltonian Chaos

18 December 2017
Mehul Raval to be Session Chair at 20th IEEE International Symposium

30 November 2017
Srikrishna Divakaran Receives Department of Science and Technology Funding for Smart Cyber Physical Systems

3 November 2017
Dhaval Patel Receives DST-ASEAN Funding for Cognitive Radio-Enabled Vehicular Cyber-Physical System for India

24 August 2017
Mehul Raval Receives Research Grant to Accelerate Research in Deep Learning and Computer Vision at the School of Engineering and Applied Science

28 June 2017
India Today Ranks Ahmedabad University 3rd Amongst India’s Top 50 Private Universities in the Best Universities Survey conducted by Nielsen

13 June 2017
Shoghi Bagul to Pursue Master of Design at the National Institute of Design

4 April 2017
Aditi Singhal Receives DST-SERB Extra Mural Research Award for Developing an Efficient Catalyst For Water Splitting to Generate Clean Energy


16 February 2017
School of Engineering and Applied Science Signs Memorandum of Understanding with Wright State University, Ohio

1 February 2017
Dhaval Patel Receives Research Funding for Non-Parametric Smart Sensing Analytics

22 December 2016
Vaibhav Joshi Wins Best Paper Award at IEEE International Conference for Introducing Invertible Fuzzy-Based Transform for Watermarking

7 November 2016
Deepak Kunzru Receives Best Paper Awards for his Study on the Modelling of Riser Reactors

15 July 2016
Deepak Verma Awarded 1st Prize for his Oral Presentation at Indira Gandhi National Tribal University

7 July 2016
Ahmedabad Professors Receive Grant from the Department of Atomic Energy for Research on Person Identification in Unconstrained Surveillance

6 July 2016
PhD Scholar Vaibhav Joshi and Professor Mehul S Raval Receive Fellowship for International Collaborative Research

20 June 2016
Ajay Karakoti Receives Research Funding Under the DST-SERB Early Career Research Award for Study on Mitigating Diseases Caused by Reactive Oxygen Species

1 June 2016
Ahmedabad Faculty Receive Research Funding from Gujarat Council on Science and Technology

20 May 2016
Mayank Jobanputra Nominated as Facilitator for Google Applied Computer Science with Android Programme

25 April 2016
Gujarat Institute of Chemical Technology to Fund Laboratory for Research in Novel Engineered Materials

15 April 2016
Dhaval Patel Awarded SERB Grant by the Department of Science and Technology
